
Biomedical Micro-Robotic Systems
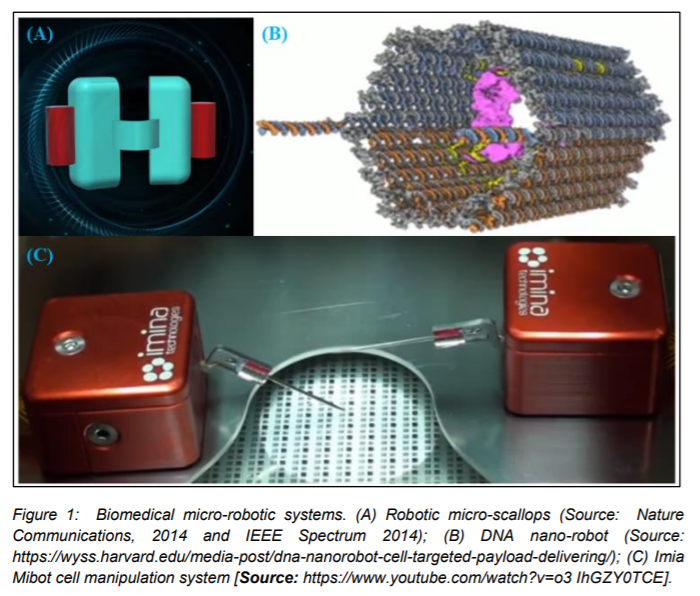
A robot is a pre-programmed device, which can elicit a specific response either upon manual stimulation or autonomously. The field of robotics offers a number of applications including remote controlled toys and humanoid robots, to name a few. Robotics based approaches are making tremendous impact in today’s medicine and biomedical technologies. In particular, surgical robots are becoming more common enabling high precision and minimally invasive surgeries. All these robotics-based approaches follow technologies at the macrostructure level. Lately, researchers have focused on developing technologies based on micro-robots. These micro-robots have been demonstrated to substitute a regular house cleaner, desktop printer, bridge inspector, micro-scallop that can swim through eyeballs, drug delivery scaffold and can also take the role of bees to help in pollination (1)(Figure 1). While there have been significant advances in micro-robotics, the research area involving use of a microrobot interacting with cells and tissues at a molecular level is relatively unexplored. Recent studies have shed light on the ability of micro-robots to operate in physiological fluids and manipulate cellular and subcellular constituents (2-4). Especially, it addresses the important application of manipulating cellular constituents including single cell manipulation and analysis by employing micro-robots.
The challenges of Single Cell Analysis
It is well known that even a primary population isolated from the same tissue does not possess similar characteristics and this heterogeneity is the hallmark of cell biology. Identical clonal populations have been shown to deviate in their genetic expression in response to external stimuli over generations of cell divisions. Thus, a generalized characteristic of a group can obscure difference between individuals in it. The aggregate and average approach used to characterize cellular function is unable to probe rich information available from study of single cells (5).
On the other hand, studies made at single cell level are not subject to the averaging effect characteristic of bulk phase population scale methods and they can offer a level of discrete observation that is unavailable with traditional biological methods. Single cell analysis provides an approach to identify the differences between the individuals in it. For example, we can take single cells as an ideal model to (i) detect disease, (ii) test medicines, (iii) develop drugs, (iv) deeper understanding of cellular functionalities and behaviors, (v) to yield new insights into signaling pathway mechanisms and the biochemical basis for cellular function, and (vi) for intercellular signaling (5).
related applications are (i) cell injection; (ii) cell characterization; (iii) cell positioning; (iv) 3D cell assembly. Cell injection and cell characterization require breaking into a single cell structure while cell positioning and 3D cell assembly simply involve moving cells to a specific, desired position in a given space (5).
To perform single cell analysis, the analysis platform should have both accurate observation and manipulation abilities. For observation, various effective microscopes such as optical microscope, atomic force microscope (AFM) and environmental scanning electron microscope (ESEM) have been developed (5). Individual cell analysis is therefore, challenging and micro-robotic manipulations offer hope in single cell analysis. We will discuss these aspects next in the following section.
Micro-Robotic Manipulators for Individual Cell Analysis
Manually manipulating single cells is tedious, time-consuming and requires special skills. These manually operated tools even when used by skilled technicians, the throughput is limited. Last two decades have witnessed the emergence of micro-robotic manipulation devices that could facilitate single cell analysis. There are two types of micro-robotic manipulators. They are (i) Wired microrobotic manipulator; (ii) Wireless microrobotic manipulator that we will describe next.
(a) Wired Micro-Robotic Manipulator
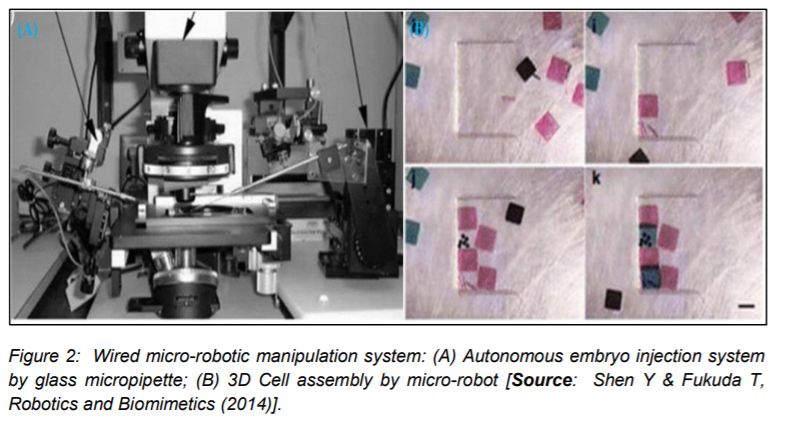
Wired micro-manipulators are macroscale tools with microscopic end attachments that can trap, hold, and inject single cell. Their actuation is mainly based on mechatronic principles such as hydraulic motor, electric motor, electrostatic actuator and piezoactuator. In this manipulation system, the micro-robot either controls the stage in which the cells are placed (or) the ends attachments which interact with the cells (Figure 2). Some of these commonly used micro-manipulator actions and steps are summarized below (5).
Micropipette injection:
Micropipette injection has been widely used owing to its low toxicity and high delivering efficiency. It normally refers to the process of using a glass micropipette to insert into or suck out substances from a single living cells. In this process, two key procedures (i) how to move pipette to the cell precisely and (ii) how to penetrate cell membrane safely determine the success of and efficiency. At such a small scale, it becomes very inefficient and
ineffective to perform the injection task by hand directly. Therefore, precise methods based on micronanorobotic manipulation systems are widely used. Two main types of injection systems are autonomous embryo injection system by glass micropipette and AFM cantilever based nanoinjection. In the autonomous embryo injection system, the single cell is handled by a pipette straw and the microinjector is assembled on the micromanipulator. The position of the micropipette can be controlled precisely by micromanipulator with a positioning resolution higher than 2 µm and more than 3 degrees of freedom. Nanoinjections based on AFM cantilever nanoprobe are also proposed recently in which a smaller injector
with nm size is used to penetrate cell and deliver the material into cell. The usage of robotic technology including image processing and force feedback could improve traditional injection system greatly (5).
Micropipette Aspiration:
It is the traditional technique for cell-cell adhesion study. In this method, 2 aspiration pipettes are assembled on 2 micromanipulators. Pipettes are used to handle and separate 2 single cells driven by micromanipulator. In this process, cell-cell adhesion strength calculated from the suction pressure applied through pipette (5).
AFM:
Atomic force microscope (AFM) is another powerful system for single cell adhesion characterization, which enables to measure the cell substrate (or) cell-cell adhesion force. One common method is to put cell on the AFM sample stage which is taken as the micromanipulator. Then cell is moved against the AFM cantilever driven by the stage and the adhesion strength can be measured from the deflection of the AFM cantilever (5).
ESEM:
Researchers have used environmental scanning electron microscope (ESEM) for the nanorobotic manipulator stage to control the movement of the
nanoneedle with nanoscale resolution inside an ESEM chamber which allows characterization of cell surface (5).
Microgripper:
Microtool such as micropipette and microgripper are assembled on the microrobotic manipulation system. The microtool has the capability to handle
and release the cell and the microrobot can control the position of microtool precisely. To improve accuracy and reproducibility, force feedback and vision feedback are also employed in the cell positioning process. There is a limitation of microtool that involves difficulties to contact with the cell during manipulation process (5).
(b) Wireless Micro-Robotic Manipulator
Wireless micro-robotic manipulators can be further categorized into non-contact and contact wireless micro-robotic manipulator. These manipulators work based on the wireless actuation principles. The commonly used wireless actuation techniques include optical tweezers, dielectrophoresis (DEP) and magnetic driving. Wireless actuation is driven by physical fields. Thus, they can manipulate the object in a narrow space with high positioning accuracy. Controllability and repeatability in wireless micro-robotics are big challenges since it is difficult to build an exact physical model to control the statues of the small objects in the field. Force generated by these methods is usually smaller than mechatronic actuation due to the physical principle. Here, we describe different types of wireless micro-robotic manipulators.
Non-contact wireless micro-robotic manipulator
The direct manipulation of the physical fields used in the wireless actuation technique comprises the non-contact micro-robotic manipulator. Optical tweezers (OT), dielectrophoresis (DEP) and opto-electronic tweezers (OET) are the three widely known non-contact manipulation techniques.
OT:
It is a technique that uses a highly focused laser beam to hold and manipulate a single cell. Fakuda et al., developed a microrobotic manipulation system based on the controlling of the light path of the optical tweezers. This study demonstrated the ability of optical tweezers to manipulate small
objects in 3D flexibility such as microbead and single cell. Drawback of optical tweezers is that the force generated by laser is usually limited to nano-newton which is not large enough to drive the non-suspending cells.
DEP:
It is a phenomenon by which a force is exerted on a dielectric particle when it is subjected to a non-uniform electric field. It is widely used for cell trapping and sorting, especially for cell analysis in microchip. Strength of force strongly depends on medium and particles’ electrical properties, on the particles’ shape and size, as well as on the frequency of electric field. One of the challenges is to fabricate nanoscale electrodes which affects manipulation accuracy.
OET:
This modality does not necessitate fabrication of electrodes and overcomes the drawback of DEP. Projected optical images are employed to grab tiny particles. Light, first creates virtual electrodes on the substrate. Then the image in conjunction with an externally applied electrical bias creates the localized DEP trap in illuminated areas.
Contact wireless micro-robotic manipulator
In contact manipulation methods, the wireless actuation physical field initially actuates a microstructure which in turn interacts with the cellular constituents to effect the manipulation. The dimensions of these microstructures are comparable to those of target cells. These micro-robots are
microstructures that can physically manipulate objects and the physical method of manipulation is programmable and operates in parallel. The significant challenges include scaling of the robot sizes and automation and geometry of the existing system. Some of the physical methods of
manipulation are described here.
Magnetic micro-robots:
These are aligned by magnetic fields and pulled by field gradients. An oscillating out of plane magnetic field which induces a stick/slip mechanism that enhances control of the robot. These microstructures are composed of iron-oxide embedded in a polymer. They are similar in density to the working fluid. Thus, very small magnetic forces are required for movement.
Hydrogel/Gas bubble micro-robots:
In this technique cavitation bubbles act as an actuation mechanism to drive hydrogel structures. Laser induced cavitation bubbles are used to drive a hydrogel structure made of Poly (ethylene glycol) diacrylate (PEGDA), a biocompatible polymer. The advantages include: (i) optically controllability; (ii) programmable for automated operation; (iii) insensitiveness to the chemistry (or) electrical conductivity of cell culture.
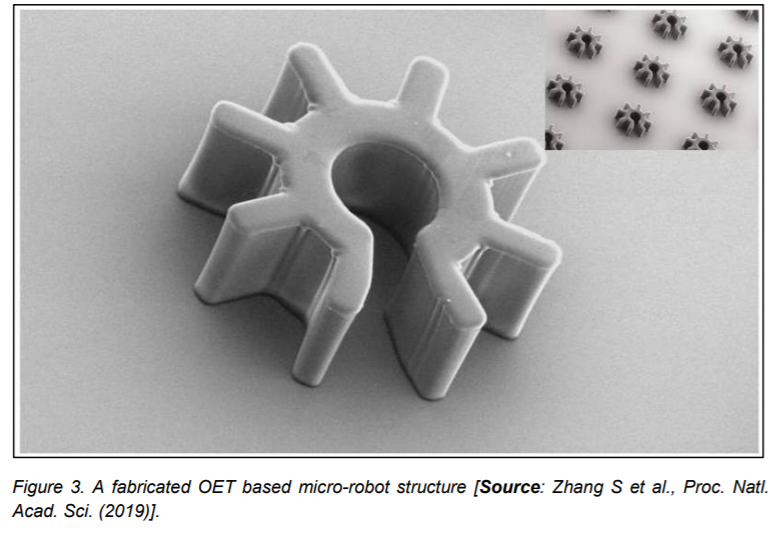
OET based micro-robots:
OET depends on light to control DEP rather than relying on photonic forces. OET light patterns are generated by consumer grade optical projectors which are suitable for parallel manipulation of multiple micro-robots. In this technique, OET primarily manipulates the micro-robot structures which are controlled to perform the cell manipulation (Figure 3).
Conclusion
Advances in micro-robots are making great strides in developing single cell manipulation techniques. The current research focus is to develop the ability of micro-robotic manipulation of cells that can accurately actuate at the micron and sub-micron scales. Currently, these micro-robotic are in the preliminary research phase. Going forward, the important challenge will be transitioning these technologies into commercially viable products that can benefit the society. However, in view of already demonstrated performance of the micro-robotic systems and their ability to participate in 3D assemble and sorting of cells, we anticipate that avenues for commercialization should happen soon. Micro-robots have the potential to take over 3D printing of organs in the future.
References
1. Tian Qiu, et al., Swimming by reciprocal motion at low Reynolds number, Nature Communications, 5, Article number: 5119 (2014).
2. Evan Ackerman, Robotic Micro-Scallops Can Swim Through Your Eyeballs, IEEE Spectrum, November 4 (2014), https://spectrum.ieee.org/automaton/robotics/medical-robots/roboticmicroscallops-can-swim-through-youreyeballs.
3. Sakar MS, Steager EB, Cowley A, Kumar V, Pappas GJ. Wireless manipulation of single cells using magnetic microtransporters, IEEE International
Conference on Robotics and Automation, (2011); DOI: 10.1109/ICRA.2011.5980100.
4. Hu W, Ishii KS, Fan Q, Ohta AT. Hydrogel microrobots actuated by optically generated vapour bubbles. Lab Chip. Oct 7;12(19):3821-6 (2012).
5. Zhang S, Scott EY, Singh J, Chen Y, Zhang Y, Elsayed M, Chamberlain MD, Shakiba N, Adams K, Yu S, Morshead CM, Zandstra PW, Wheeler AR. The optoelectronic microrobot: A versatile toolbox for micromanipulation, Proc Natl Acad Sci. Jul 23;116 (30):14823-14828
(2019).
6. Shen Y, Fukuda T. State of the art: micronanorobotic manipulation in single cell analysis, Robotics and Biomimetics, 1, Article 21 (2014); DOI:
https://doi.org/10.1186/s40638-014- 0021-4.